Construire un robot semi-fonctionnel en 3D : guide étape par étape

Dans un monde où la technologie évolue rapidement, la réalisation d’un robot semi-fonctionnel en impression 3D devient une aventure accessible pour les passionnés comme pour les professionnels. La convergence entre robotique, fabrication additive et composants électroniques a permis de démocratiser la conception de machines personnalisées capables d’exécuter des tâches concrètes. Ce guide détaillé explore comment, en partant d’un modèle numérique, procéder à la construction d’un robot partiellement autonome, intégrant des pièces imprimées en 3D avec un ensemble de modules électroniques et mécaniques. Il met en lumière les technologies, les plateformes, ainsi que les astuces indispensables pour optimiser le projet, de la modélisation sur Fusion 360 aux circuits pilotés via Arduino ou Raspberry Pi. Au-delà de la simple superposition de couches de filament, ce processus met l’accent sur la planification rigoureuse et la maîtrise de chaque étape, depuis la conception CAO jusqu’à la programmation finale. Cet article propose une immersion complète dans l’univers du DIY robotique hautement personnalisé, en valorisant l’utilisation combinée d’outils comme Tinkercad pour l’initiation, les kits Makeblock ou VEX Robotics pour les pièces mécaniques et les commandes électroniques, tout en restant pragmatique sur les limites et défis techniques.
Choisir et planifier la conception d’un robot 3D semi-fonctionnel : étapes et outils clés
Le succès d’un projet de robot semi-fonctionnel repose avant tout sur une planification précise. Il est primordial de définir l’objectif principal du robot : s’agit-il d’un automate destiné à des tâches simples comme le déplacement et la détection d’obstacles, ou d’une plateforme plus complexe intégrant des interactions sonores ou visuelles ? Une fois cet objectif fixé, la sélection des outils et composants peut commencer.
La modélisation 3D est le premier jalon crucial. Fusion 360 s’impose en 2025 comme le logiciel de modélisation paramétrique le plus complet pour les projets complexes d’ingénierie. Sa capacité à générer des fichiers STL optimisés pour l’impression 3D facilite grandement le passage de la conception à la fabrication. Pour les débutants, des plateformes gratuites comme Tinkercad permettent une familiarisation rapide avec la dimension 3D sans perdre le fil de l’objectif final.
Pour la mécanique, des kits modulaires tels que Makeblock et VEX Robotics offrent des solutions robustes et éprouvées, permettant de combiner structure imprimée et pièces métalliques ou en plastique injecté. Ces plateformes proposent également des composants électroniques compatibles, comme des servomoteurs, capteurs et cartes de contrôle prêts à être intégrés.
Enfin, l’électronique qui anime le robot peut reposer sur des microcontrôleurs accessibles, comme Arduino, ou des microordinateurs comme Raspberry Pi pour des projets plus ambitieux incluant vision artificielle ou traitement de données avancé. Cette diversité permet d’adapter la complexité du robot selon ses compétences et besoins.
- Définir clairement les fonctions du robot
- Choisir un logiciel 3D adapté (Fusion 360, Tinkercad)
- Opter pour un kit robotique modulaire compatible avec impression 3D
- Penser à l’électronique (Arduino, Raspberry Pi)
- Planifier le budget et le temps de réalisation
| Outils / Plateformes | Usage principal | Niveau requis |
|---|---|---|
| Fusion 360 | Modélisation CAO avancée | Intermédiaire à expert |
| Tinkercad | Modélisation 3D simple et rapide | Débutant |
| Makeblock | Modules mécaniques et électroniques | Débutant à intermédiaire |
| VEX Robotics | Conception robotique éducative et compétitive | Intermédiaire |
| Arduino | Contrôle électronique et programmation simple | Débutant à intermédiaire |
| Raspberry Pi | Micro-ordinateur et traitements avancés | Intermédiaire à avancé |
Ce tableau aide à sélectionner les outils en fonction de vos compétences et des objectifs spécifiques du projet. Pour une première expérience, combiner Tinkercad et Arduino avec un kit Makeblock est une approche recommandée.
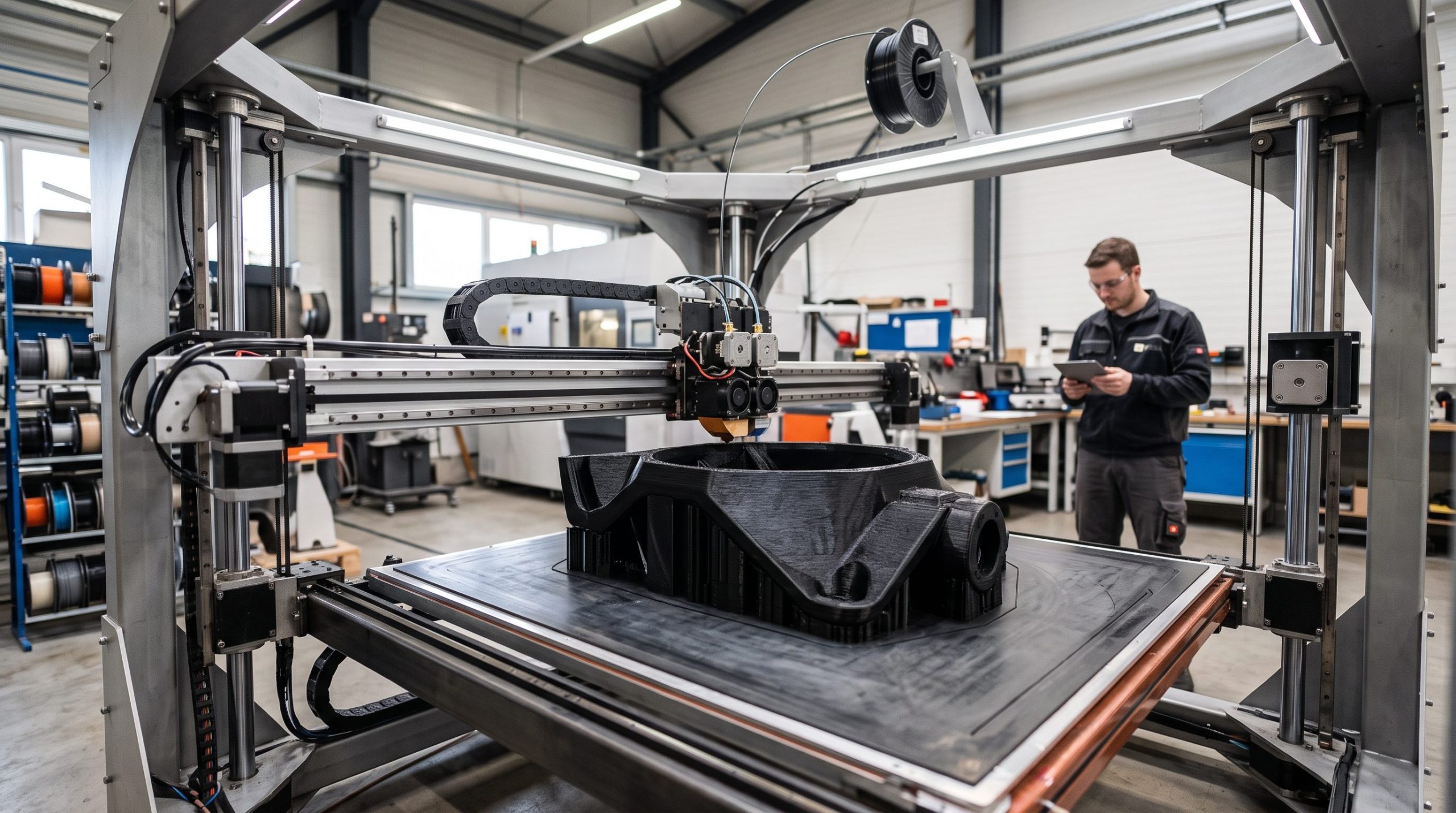
Impression 3D des composantes mécaniques : choix des matériaux et optimisation des pièces
La fabrication additive permet une personnalisation sans précédent des structures robotiques. Les pièces critiques pour la mécanique, telles que les supports moteurs, les engrenages ou les fixations, peuvent être conçues spécifiquement selon les besoins du projet. Le choix du matériau est alors primordial pour garantir la résistance et la durabilité du robot.
En 2025, les filaments techniques tels que le PETG, le nylon renforcé ou même les composites à base de fibres de carbone gagnent en popularité dans la robotique amateur et professionnelle. Ces matériaux offrent un compromis entre facilité d’impression, rigidité et comportement mécanique adapté aux contraintes mécaniques courantes. Le PLA reste néanmoins privilégié pour des prototypes légers ou des modèles non soumis à de fortes contraintes.
L’optimisation du design passe également par la réduction du poids et la simplification des formes. Fusion 360 intègre désormais des outils avancés de simulation structurelle qui permettent de prévoir les points de faiblesse et de renforcer les zones critiques, tout en économisant du filament. Cette approche s’inscrit dans les meilleures pratiques de la fabrication additive, notamment pour limiter les temps d’impression et affiner la qualité.
- Choisir un filament compatible avec les contraintes mécaniques (PETG, Nylon, PLA)
- Utiliser la simulation mécanique pour optimiser la forme
- Préférer les structures creuses ou alvéolées pour économiser du matériau
- Soigner les réglages d’imprimante : épaisseur de couche, remplissage, température
- Intégrer les composants électroniques dans la conception des pièces
| Matériau | Avantages | Limites | Applications robotiques |
|---|---|---|---|
| PLA | Facile à imprimer, économique | Faible résistance mécanique et thermique | Prototypes, pièces non structurelles |
| PETG | Bonne résistance et flexibilité | Peut être collant selon la marque | Pièces structurelles légères, supports |
| Nylon | Robuste, résistant à l’usure | Difficile à imprimer, hygroscopique | Engrenages, pièces mobiles |
| Composite carbone | Léger et très rigide | Coût élevé, abrasif pour buse | Châssis, pièces de renfort |
Une maîtrise approfondie des paramètres d’impression garantit la qualité des pièces, notamment dans la gestion des supports et la calibration. À noter que l’intégration directe de pièces préfabriquées peut s’avérer judicieuse, notamment lorsque la précision dépasse les capacités d’une imprimante 3D domestique.
Assemblage électronique et programmation : intégrer Arduino, Raspberry Pi et plateformes robotiques
Une fois les pièces mécaniques imprimées, l’étape suivante repose sur l’intégration du système de contrôle: capteurs, moteurs, actuateurs et cartes électroniques. Arduino se présente comme une solution incontournable pour piloter des moteurs et capteurs avec simplicité. La vaste communauté et la disponibilité d’exemples facilitent l’apprentissage. Raspberry Pi, plus puissant, permet des fonctions avancées comme la reconnaissance d’image ou la communication réseau.
Pour les activités éducatives ou DIY, les kits VEX Robotics et Makeblock offrent des modules plug-and-play qui réduisent la complexité électronique tout en garantissant un haut degré de personnalisation. La programmation peut se faire aussi bien en C++, Python, ou via des interfaces graphiques conviviales suivant la plateforme.
- Connecter les servomoteurs et moteurs aux sorties Arduino
- Installer les capteurs de distance et les modules de communication
- Programmer les routines de mouvement et de détection
- Intégrer Raspberry Pi pour l’interface utilisateur et les fonctions avancées
- Tester les algorithmes dans un environnement contrôlé avant déploiement
| Composant électronique | Fonction | Langages de programmation recommandés |
|---|---|---|
| Arduino Uno | Contrôle moteur simple, capteurs | C++, Arduino IDE |
| Raspberry Pi 4 | Traitement avancé, prise de décision | Python, Linux Shell |
| Modules Makeblock | Interface robotique modulaire | Scratch, Arduino |
| Capteurs ultrason | Détection d’obstacles | C++, Python |
| Servomoteurs | Mouvement précis | Arduino, Makeblock |
Pour approfondir la programmation et le pilotage, il est utile de se référer aux nombreux tutoriels en ligne sur des plateformes comme tecnobits.com ou des manuels spécialisés tels que le manuel de l’ingénieur robotique. Ce mariage entre impression 3D et robotique électronique ouvre la voie à des machines semi-autonomes polyvalentes.
Test, calibration et améliorations : valider et optimiser les performances du robot 3D
La phase finale d’un projet de robot semi-fonctionnel consiste en une série de tests rigoureux. Elle permet de vérifier la cohérence des pièces imprimées, la réactivité des capteurs, la fluidité des mouvements et la stabilité du système. Cette étape est aussi l’occasion de corriger des erreurs de conception ou de programmation.
Pour assurer la robustesse du robot, une répétition systématique des cycles de test est nécessaire. Des outils comme RoboMaster – célèbre pour ses compétitions robotiques – démontrent l’importance des mises au point liées à l’intégration mécanique et logicielle. Par exemple, des problèmes communs comme la surchauffe des moteurs ou les interférences électroniques demandent des ajustements minutieux.
- Effectuer des tests fonctionnels par modules
- Mesurer les performances mécaniques et électroniques
- Adapter le code aux comportements observés
- Réimprimer les pièces en cas de défauts ou fragilité
- Documenter les améliorations pour futur développement
| Tests | Objectifs | Méthodes |
|---|---|---|
| Test mécanique | Solidité et assemblage | Simulation puis tests réels sur terrain |
| Test électronique | Réactivité et précision des capteurs | Oscilloscope, multimetre, essais fonctionnels |
| Test logiciel | Stabilité du programme | Debugger, logs en temps réel |
| Tests combinés | Performance globale | Mise en situation, parcours d’obstacles |
Cette méthode itérative, propre aux cycles de développement industriels, améliore sensiblement la fiabilité. On retrouve cette approche dans les projets communautaires autour de D Hubs ou les compétitions RoboMaster qui encouragent l’innovation collaborative.
Perspectives innovantes : intégration de la robotique modulaire et la fabrication additive avancée
L’évolution technologique en robotique est accélérée grâce à l’alliance avec la fabrication additive, offrant de nouvelles perspectives concrètes aux concepteurs amateurs comme professionnels. Le développement des modules robotiques interchangeables, standards chez Makeblock ou VEX Robotics, permet désormais d’imaginer des robots évolutifs et facilement adaptables à divers usages.
Par ailleurs, les avancées en impression 3D multi-matériaux et biocompatibles ouvrent la voie à une robotique plus écologique et personnalisée. L’utilisation conjointe de la CNC Robotics, qui mixe différents procédés d’usinage, et des technologies de scan 3D pour la rétro-conception d’éléments complexes, permet d’accélérer les cycles de prototype tout en améliorant la qualité globale.
Enfin, la digitalisation progressive des processus, conjuguée à l’intelligence artificielle, entraîne une automatisation accrue des phases de conception, d’assemblage et même de maintenance prédictive. Ces tendances impactent déjà la chaîne logistique locale, à l’image des D Hubs qui favorisent une production décentralisée et réactive.
- Modules robotiques standardisés et interchangeables
- Impression 3D multi-matériaux pour pièces fonctionnelles
- Intégration de la CNC Robotics pour usinage polyvalent
- Numérisation 3D et rétro-ingénierie pour optimisation
- Automatisation par intelligence artificielle et fabrication additive
| Technologie | Description | Bénéfices |
|---|---|---|
| Modules Makeblock et VEX Robotics | Systèmes mécaniques et électroniques modulaires | Flexibilité, évolutivité du robot |
| Impression 3D multi-matériaux | Combinaison de plastiques et matériaux composites | Pièces complexes et fonctionnelles |
| CNC Robotics | Usinage numérique allié à l’impression 3D | Précision et rapidité de fabrication |
| Scan 3D/Rétro-ingénierie | Reconstruction des pièces anciennes ou complexes | Gain de temps, compatibilité accrue |
| IA et automatisation | Optimisation des processus conception/assemblage | Réduction des erreurs, production agile |
Pour enrichir votre compréhension de ces écosystèmes dynamiques, la consultation d’articles spécialisés sur impression3denligne.fr permet d’anticiper les usages futurs et les synergies entre robotique et fabrication additive.
Voir cette publication sur Instagram
Questions fréquentes sur la construction de robots semi-fonctionnels en 3D
- Quel type de robot est accessible aux débutants avec impression 3D ?
Les robots basés sur Arduino et kits Makeblock permettent de construire des machines simples avec des fonctions de base, idéales pour se familiariser avec la robotique. - Peut-on imprimer en 3D toutes les pièces d’un robot ?
Certaines pièces nécessitent précision ou matériaux spécifiques difficiles à imprimer (moteurs, roulements). Il est donc courant de combiner impression avec composants standards. - Quels logiciels sont recommandés pour la modélisation robotique ?
Fusion 360 pour les utilisateurs avancés et Tinkercad pour les débutants sont les choix les plus populaires en 2025. - Comment intégrer la programmation dans un projet robotique 3D ?
Arduino IDE et Python sur Raspberry Pi offrent des environnements de programmation adaptés, avec un large support communautaire. - Quelles sont les limites majeures d’un robot semi-fonctionnel imprimé en 3D ?
Les limites concernent souvent la puissance mécanique et la durabilité des pièces imprimées par rapport à des composants industriels standards.










Laisser un commentaire